Hafiq’s paper on social navigation accepted in UR 2024
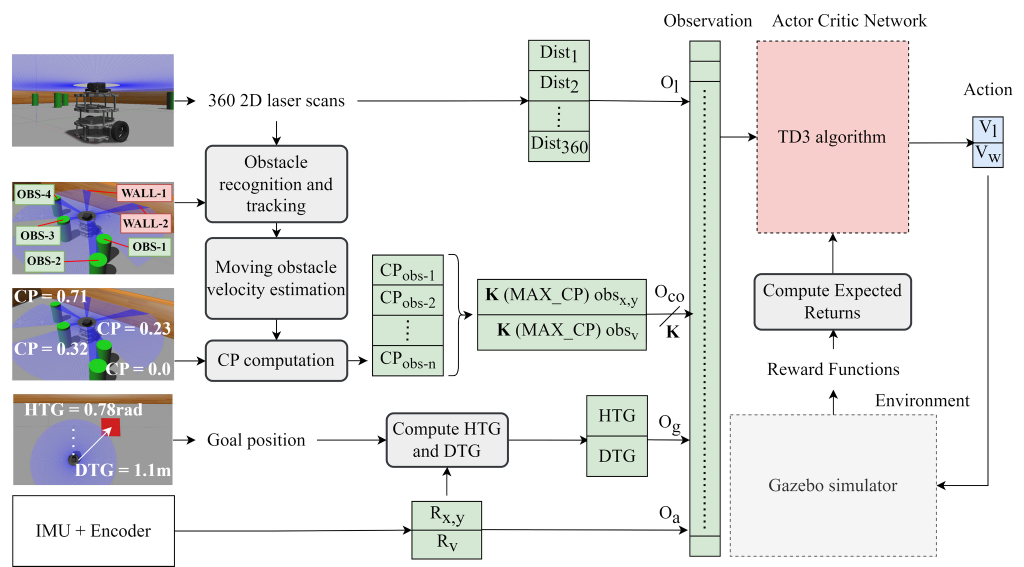
Hafiq’s paper on “Deep Reinforcement Learning-Based Mapless Crowd Navigation with Perceived Risk of the Moving Crowd for Mobile Robots” has been accepted to the 21st International Conference on Ubiquitous Robots (UR 2024) to be held at the Kimmel Center for University Life in NYU, Manhattan, New York, USA, from June 24 to 27, 2024. This […]
Hafiq’s paper on social navigation accepted in UR 2024 Read More »




