“Robotaurant” first phase completion
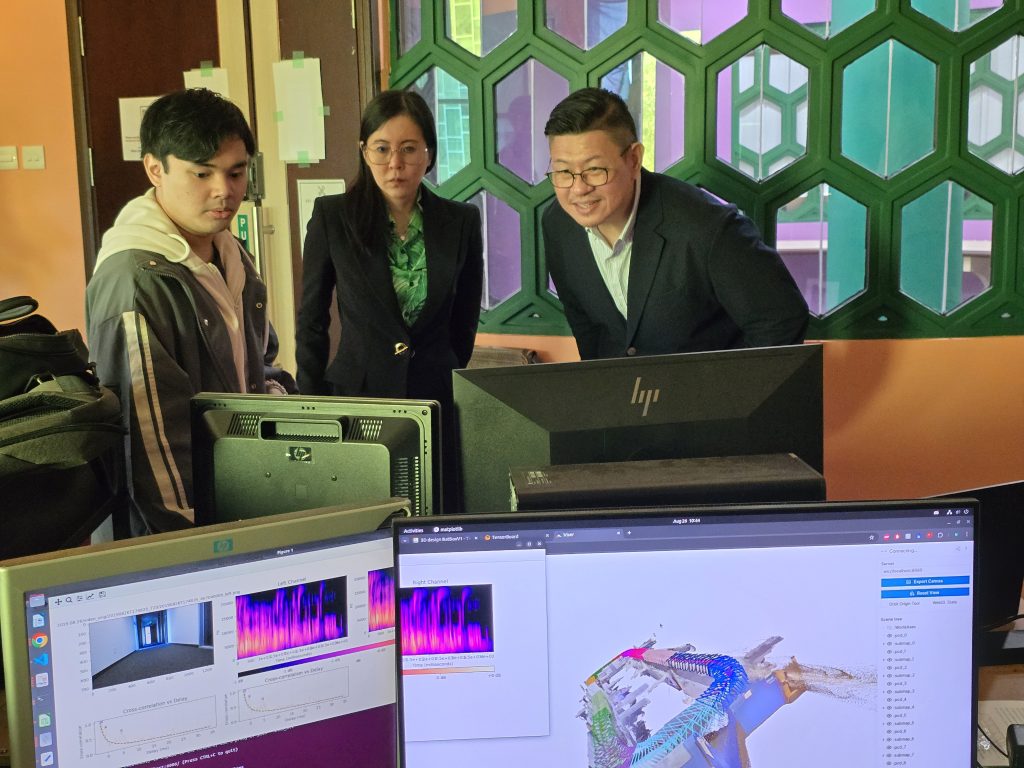
Students from our Artificial Intelligence and Robotics (AIR) and Applied Artificial Intelligence (AAI) majors, after three months, completed their project, Robotaurant, for the module ZA-3201 Intelligent Systems Lab. There were 13 students mentored by Prof. Liya, Dr. Ajaz, me and a few members of Robolab. The team put together three robots to run a restaurant! […]
“Robotaurant” first phase completion Read More »