This is Syamimi’s MSc work. We continue our exploration in self-driving car technology.
Game-Theoretic Integration in Imitation Learning for Safe Lane-Changing
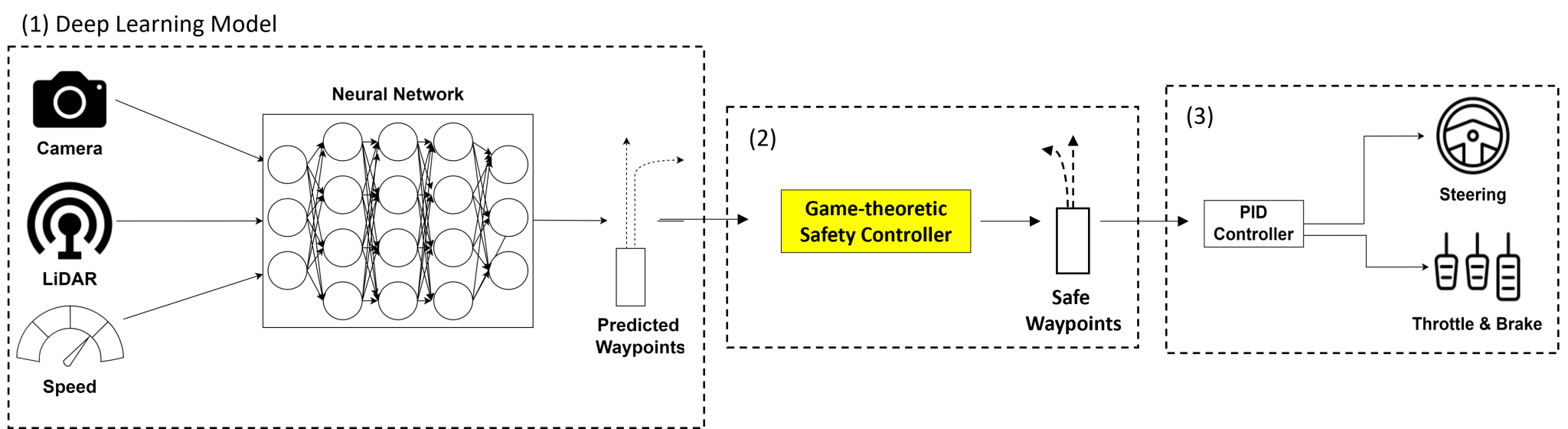
Safe driving remains a major challenge for autonomous vehicles, particularly in complex and safety-critical scenarios. While imitation learning (IL) has shown promising driving performance, IL-based models often struggle with robustness when faced with rare or high-risk events. In this work, we study the integration of game theory within the IL pipeline.
People
- Noorsyamimi binti Haji Abdur Ajak
- Ong Wee Hong
- Owais Ahmed Malik
- Collaborators: Fanta Camara
Data/Codes
Publications
- Noorsyamimi Abdur Ajak, Fanta Camara, Owais Ahmed Malik and Wee Hong Ong, “Game-Theoretic Integration in Imitation Learning for Safe Lane-Changing,” 2nd Workshop on Safety of Intelligent and Autonomous Vehicles: Formal Methods vs. Machine Learning approaches for reliable navigation (SIAV-FM2L) held in conjunction with 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025), Hangzhou, China, 20 October 2025 (paper, poster)
Media
Vehicles Adaptability in Deep Learning training Pipeline for Autonomous Cars
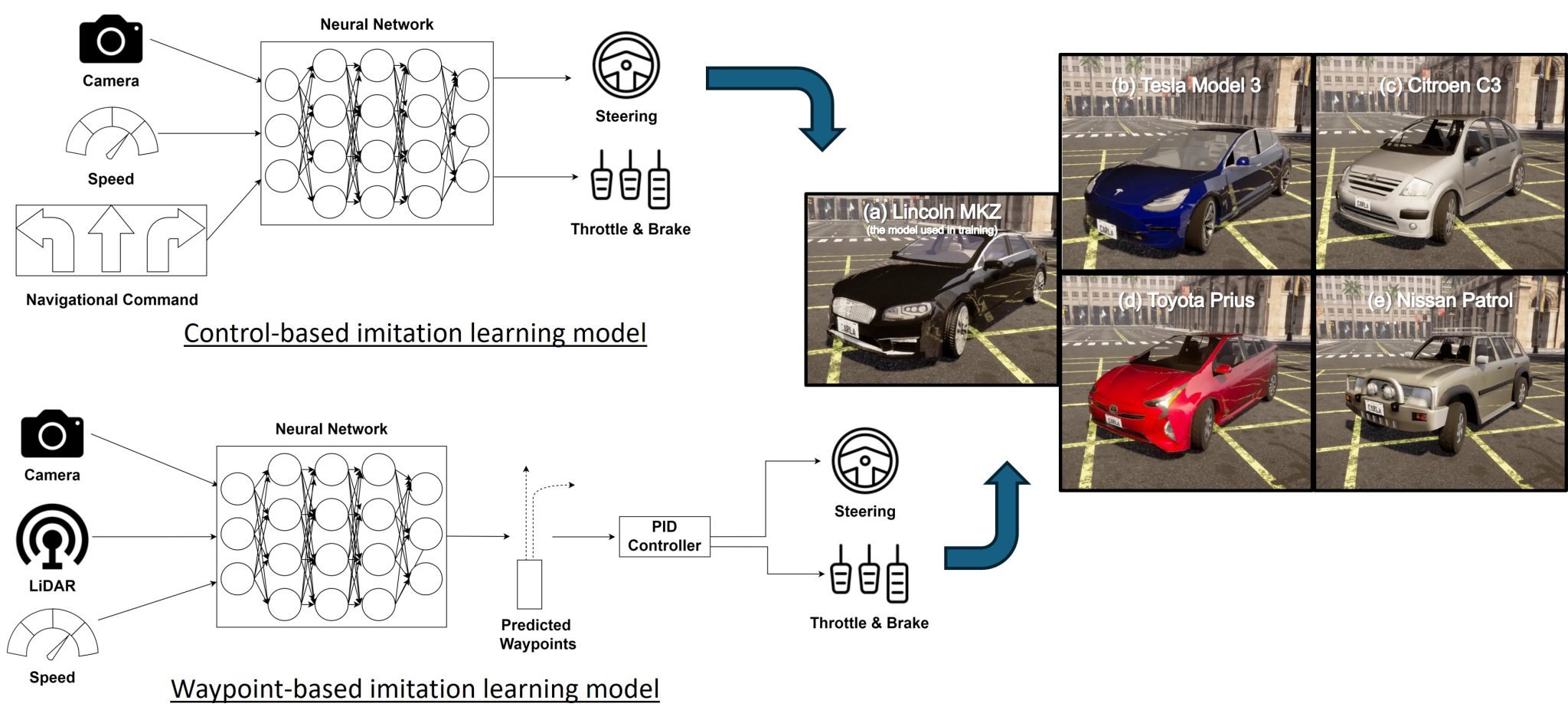
Autonomous driving deep-learning models are trained on a dataset from a particular egocar. We hypothesize the performance will deteriorate when used on a different egocar. In this project, we study suitable imitation learning pipelines for autonomous car that will improve its performance when deployed on different egocars.
People
- Noorsyamimi binti Haji Abdur Ajak
- Ong Wee Hong
- Owais Ahmed Malik
Data/Codes
- Comparison of Autonomous Driving IL Pipeline for Ego-Vehicle Changes: https://github.com/ailabspace/Comparison-of-Autonomous-Driving-IL-Pipeline-for-Ego-Vehicle-Changes.
Publications
- Noorsyamimi Abdur Ajak, Wee Hong Ong and Owais Ahmed Malik, “A Comparison of Imitation Learning Pipelines for Autonomous Driving on the Effect of Change in Ego-vehicle,” 35th IEEE Intelligent Vehicles Symposium (IV), Jeju, South Korea, 2-5 June 2024 (paper, poster)
Media
Video segments showing performance of the models deployed on different ego-vehicles.