Nazrul’s paper with the title “Optimizing Odometry Accuracy through Temporal Information in Self-Supervised Deep Networks” has been accepted and presented at the 20th International Conference on Ubiquitous Robots (UR 2023) held in the Hawai’i Convention Center, Honolulu, Hawaii.

In this paper, we propose a self-supervised deep recurrent convolutional network with a self-attention pipeline for LiDAR-Inertial odometry estimation that leverages temporal information. In contrast to existing learning-based approaches, our network does not require expensive ground truth and it utilizes sliding window optimization for self-supervisory signal for training. The results indicate that the proposed network is able to achieve accuracy levels comparable to conventional model-based methods and outperform other learning-based approaches that do not incorporate temporal information. Our findings provide strong evidence for the potential of incorporating temporal information in deep networks for LiDAR-Inertial odometry and highlight the effectiveness of our proposed self-supervised approach.
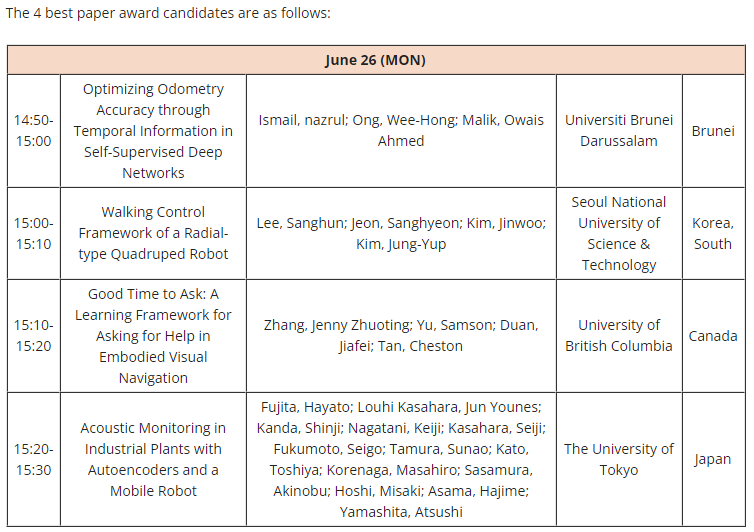
The paper was selected as one of the four best paper award candidates among papers from the Seoul National University of Science and Technology, University of Tokyo and University of British Columbia.
Congratulations Nazrul!
Ref: https://2023.ubiquitousrobots.org/?page_id=102
Project page: https://ailab.space/projects/enhancing-odometry-estimation-through-deep-learning-based-sensor-fusion/