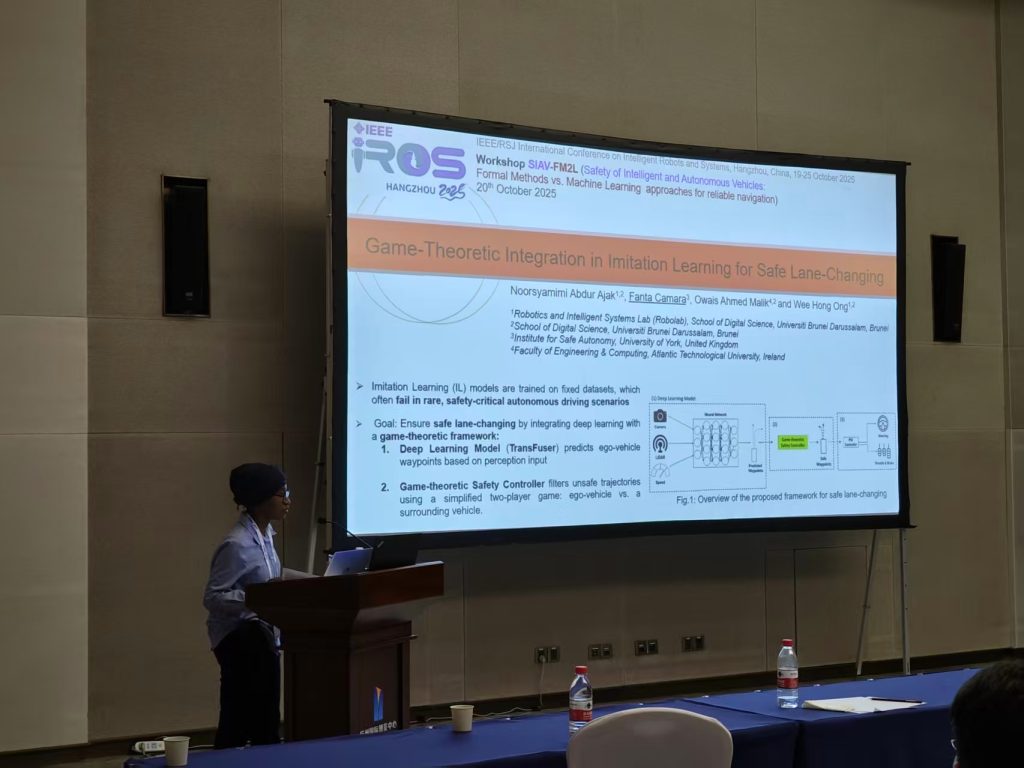
Syamimi’s poster presented at SIAV-FM2L Workshop at IROS 2025
Syamimi’s paper has been accepted for poster presentation at the workshop SIAV-FM2L: Safety of Intelligent and Autonomous Vehicles: Formal Methods vs. Machine Learning approaches for reliable navigation (https://events.robotogether.com/ws-iros-2025/), held in conjunction with IROS 2025. The paper entitled “Game-Theoretic Integration in Imitation Learning for Safe Lane-Changing” described our proposal in incorporating a game-theoretic safety controller into […]
Syamimi’s poster presented at SIAV-FM2L Workshop at IROS 2025 Read More »