Rubik’s Cube Solving Robot
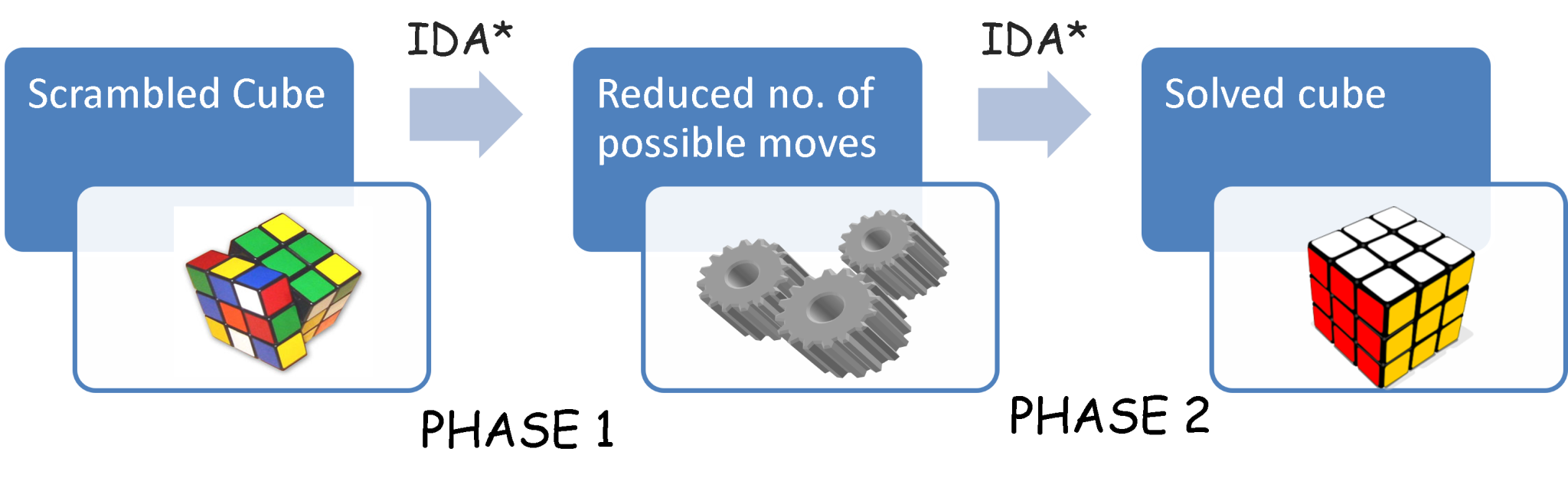
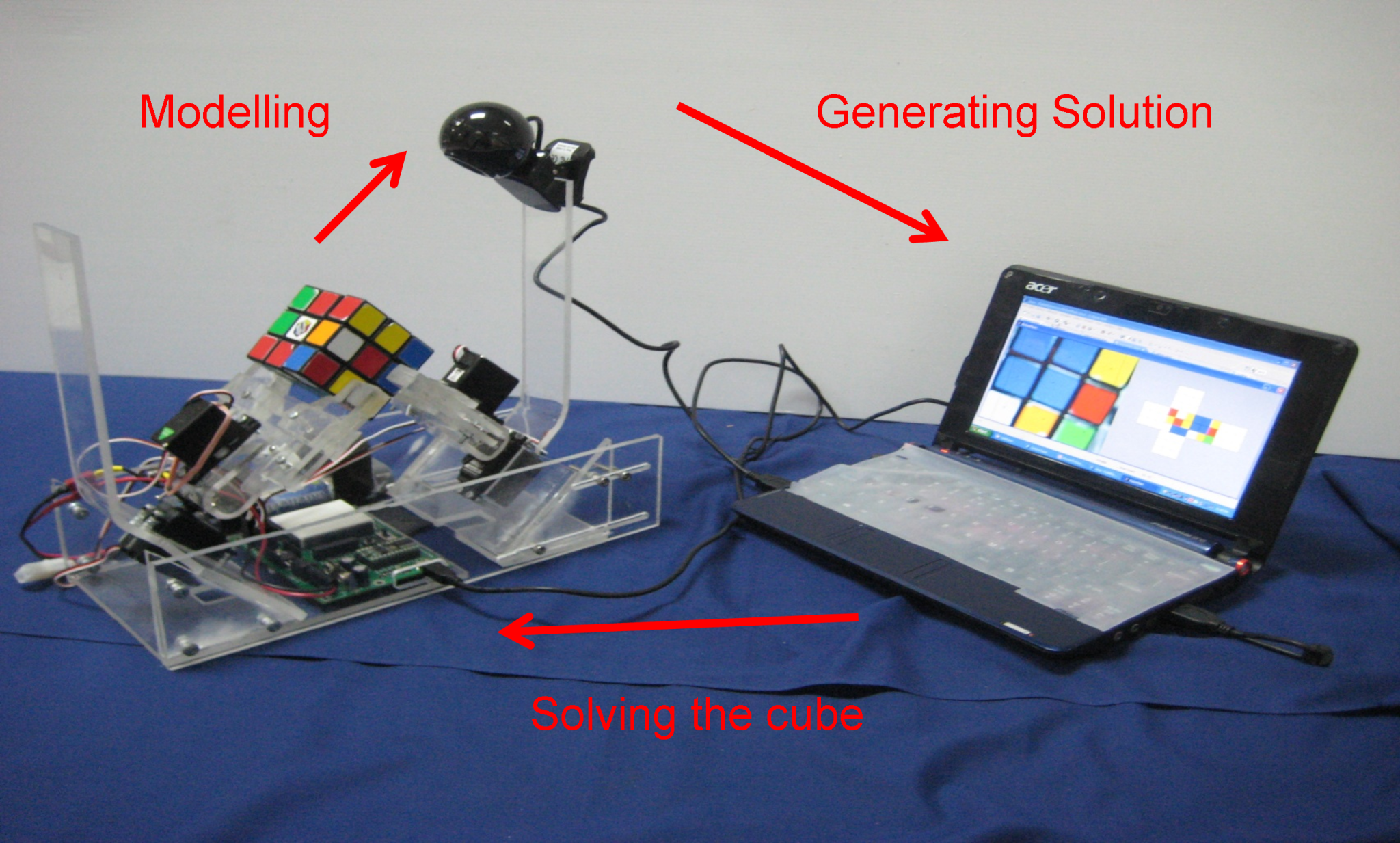
This is Isyrah’s BSc second year programming project. We constructed a robotic gripper to solve a 3×3 Rubik’s cube. The robot uses a webcam to detect the faces of the Rubik’s cube and a Basic Stamp microcontroller to control the movement of the gripper. A* search algorithm is implemented on a laptop that connects to the Basic Stamp microcontroller.
This project received numerous prizes including; (1) Winner of Brunei IET Network Present Around The World (PATW) competition, (2) Winner of Asia Pacific IET Network Present Around The World (PATW) competition in Pune, India, (3) Represented Asia Pacific IET Network at Present Around The World (PATW) competition in London, UK, (4) Winner of the Tertiary Category of Brunei ICT Awards (BICTA) 2010 and (5) Represented Brunei in Tertiary Category at the Asia Pacific ICT Awards (APICTA) 2010 in Kuala Lumpur, Malaysia.
People
- Isyrah Fahmi bin Hj Osman
- Ong Wee Hong
Data/Codes
Publications
Media
