Implementation of Deep Learning algorithm for Self-Driving Car
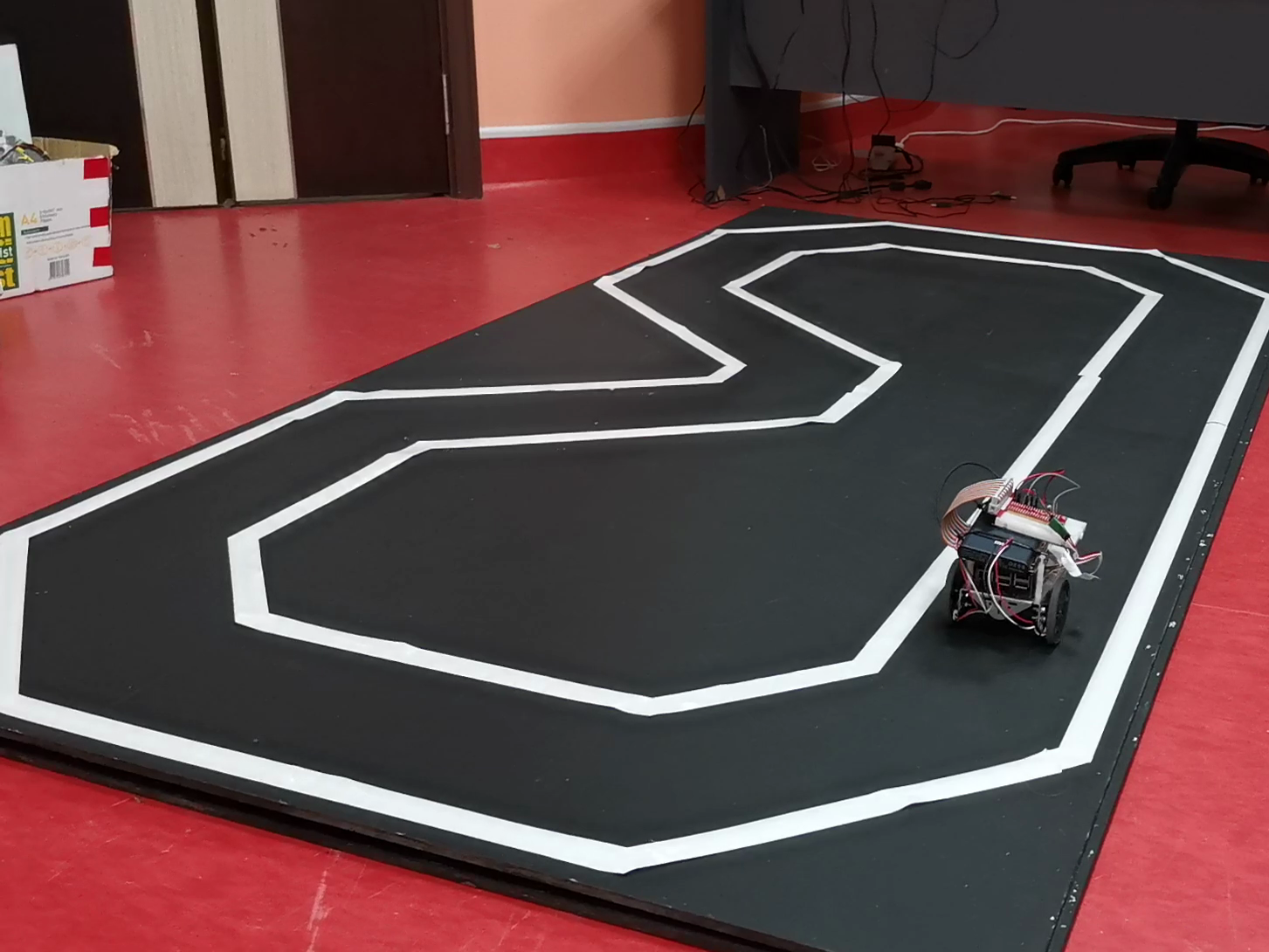
This is our initial attempt to learn about autonomous driving. We did a few final year projects in trying to convert a toy car to a self-driving car. We didn’t get far, however we learned quite a bit about autonomous driving. In this project we implemented deep-learning model for self-driving car on a remote-control car. The input to the system is a live stream of images from a front mounted USB camera. The model implemented is the CNN architecture described in the paper End to End Learning for Self-Driving Cars (2016) by Mariusz Bojarski et al. from NVIDIA. Two parallel networks were deployed to predict the steering angle and speed. The models were trained from the training data collected in the same driving environment.
People
- Hj. Md. Wafi Nur Arif b. Hj. Shamdi
- Ho Ying Ying
- Mohammad Fathin Haji Bujang
- Ong Wee Hong
- Owais Ahmed Malik
- Pg Dr. Haji Nor Jaidi bin Haji Pg Tuah