Syamimi’s paper has been accepted for poster presentation at the workshop SIAV-FM2L: Safety of Intelligent and Autonomous Vehicles: Formal Methods vs. Machine Learning approaches for reliable navigation (https://events.robotogether.com/ws-iros-2025/), held in conjunction with IROS 2025.
")
")
")
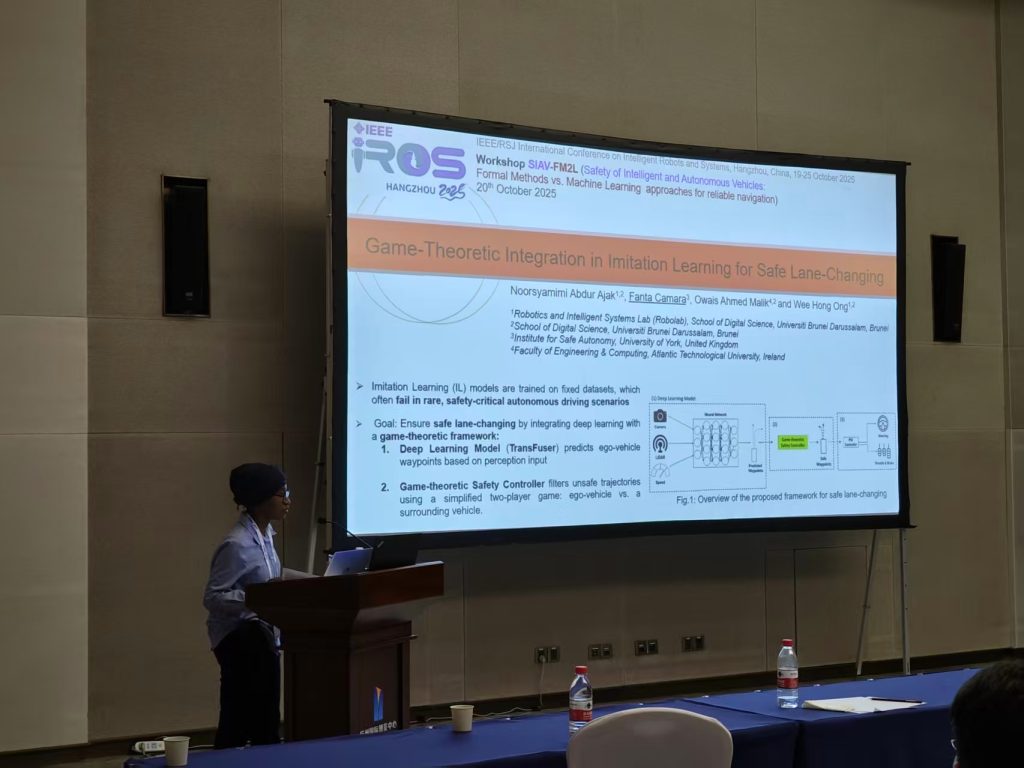
The paper entitled “Game-Theoretic Integration in Imitation Learning for Safe Lane-Changing” described our proposal in incorporating a game-theoretic safety controller into the imitation learning (IL) pipeline of an autonomous vehicle to improve safe autonomy during lane changing. Our collaborator Dr Fanta Camara from the Institute for Safe Autonomy, University of York, UK presented the poster at Hangzhou, China.
Project page: https://ailab.space/projects/improving-egovehicle-control-in-deep-learning-training-pipeline-for-autonomous-cars/